Along with the ability to automatically adjust to the surface they’re traversing, the legs move faster and jump higher than their more standardized electric counterparts.
© 2024 TechCrunch. All rights reserved. For personal use only.
Researchers at ETH Zürich are very good at keeping robots standing upright. Back in 2022, the school’s robotics team taught the quadrupedal ANYmal robot how to hike up mountains without falling over. New research from the school, published in collaboration with the Stuttgart-based Max Planck Institute for Intelligent Systems, takes a unique approach to the problem of traversing uneven terrain.
Artificial muscles showcased by the schools are powered by a hybrid electro-hydraulic system. Along with the ability to adjust automatically to the surface they’re traversing, the legs move faster and jump higher than their more standardized electric counterparts, all without requiring additional sensors or controls.
The legs’ actuators are surprisingly simple. The teams describe them as “oil-filled plastic bags, similar to those used to make ice cubes.” Those bags are then covered in electrodes. Honestly, the whole thing sounds a bit like a school science project.
“[A]s soon as we apply a voltage to the electrodes, they are attracted to each other due to static electricity,” says grad student Thomas Buchner. “Similarly, when I rub a balloon against my head, my hair sticks to the balloon due to the same static electricity.”
The bags then expand or contract, based on the voltage being applied. Unlike standard electric actuators, the system doesn’t generate a lot of heat.
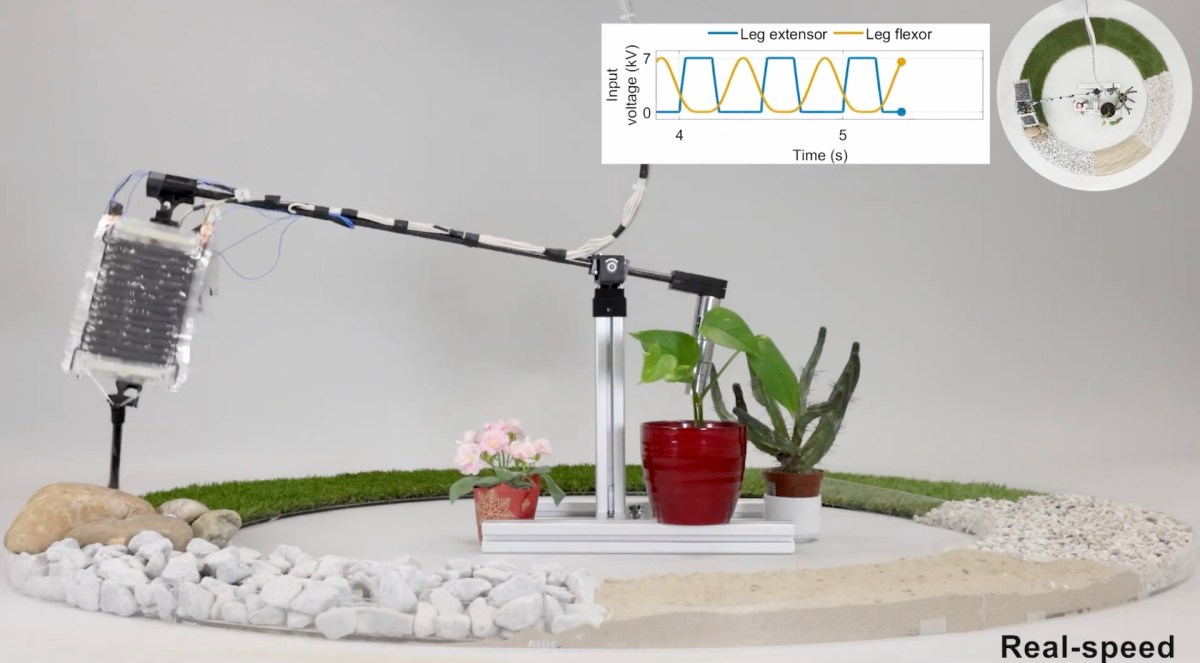
So the actuators help the system traverse uneven terrain and help it jump high. In terms of real-world use, however, the system still has a long way to go.
“Compared to walking robots with electric motors, our system is still limited. The leg is currently attached to a rod, jumps in circles and can’t yet move freely,” says Christoph Keplinger, a professor at Max Planck Institute. “If we combine the robotic leg in a quadruped robot or a humanoid robot with two legs, maybe one day, when it is battery-powered, we can deploy it as a rescue robot.”
Leave a Reply